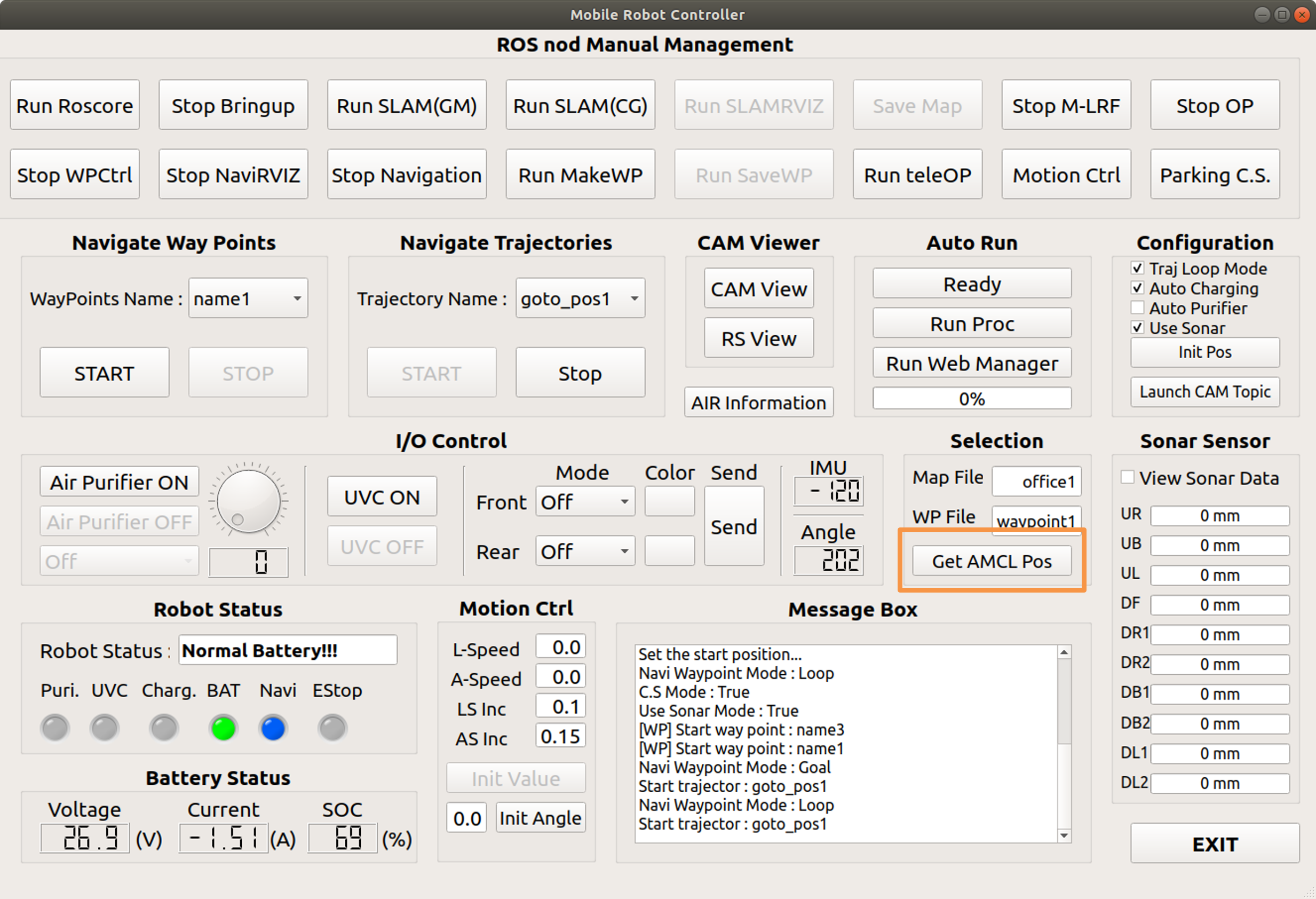
AMCL Pos
Outputs a window to get the robot’s current coordinates
Based on the coordinates obtained using this function, set the coordinates of the locations with the purpose used for autonomous driving.
GUI execution screen when button is clicked
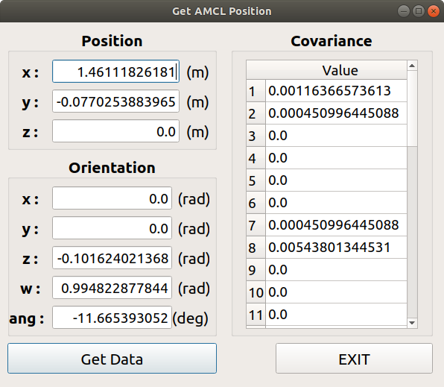
Outputs a window to get the robot’s current coordinates
Based on the coordinates obtained using this function, set the coordinates of the locations with the purpose used for autonomous driving.
GUI execution screen when button is clicked