Mapping
Creating maps for automated driving
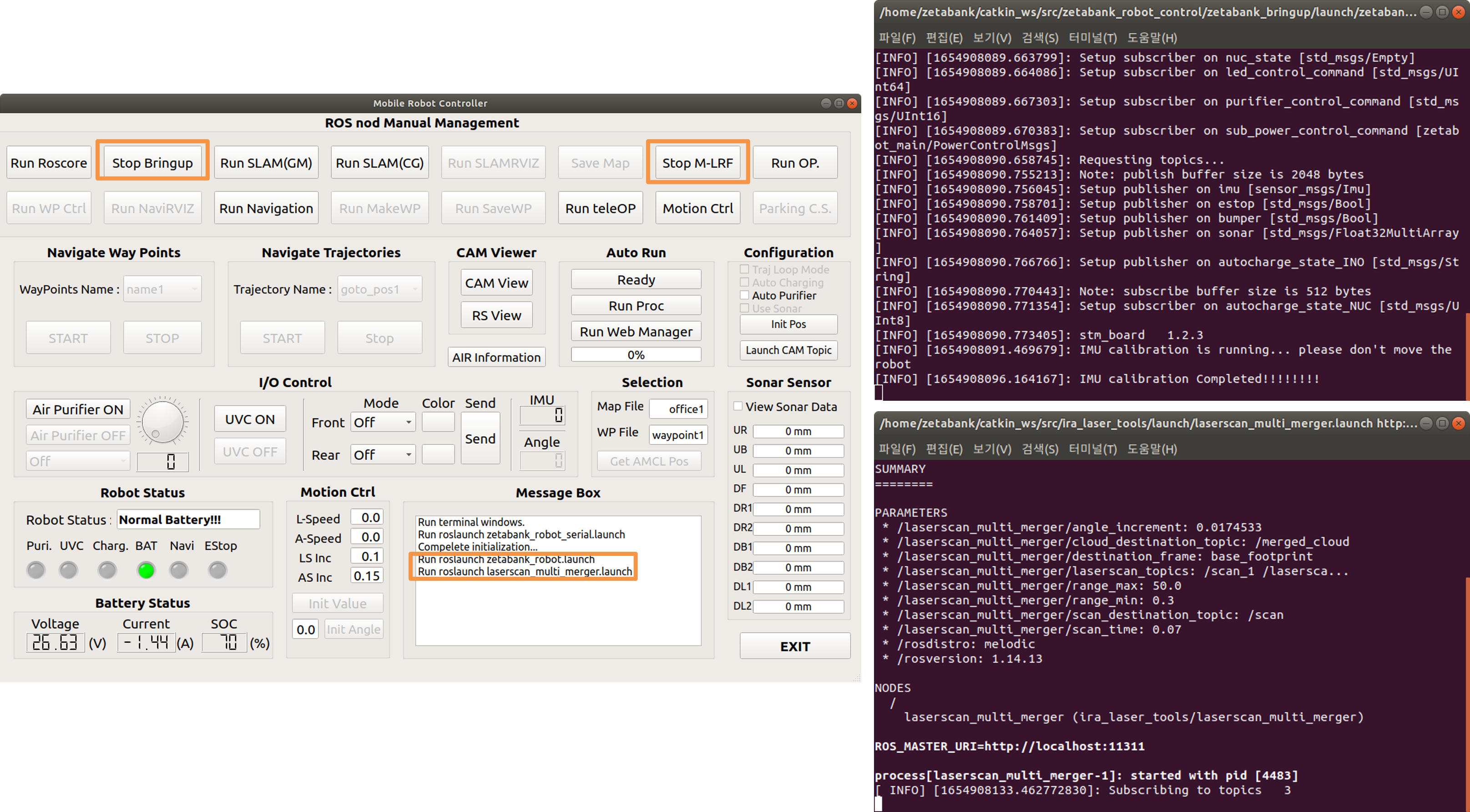
Run Bringup & M - LRF
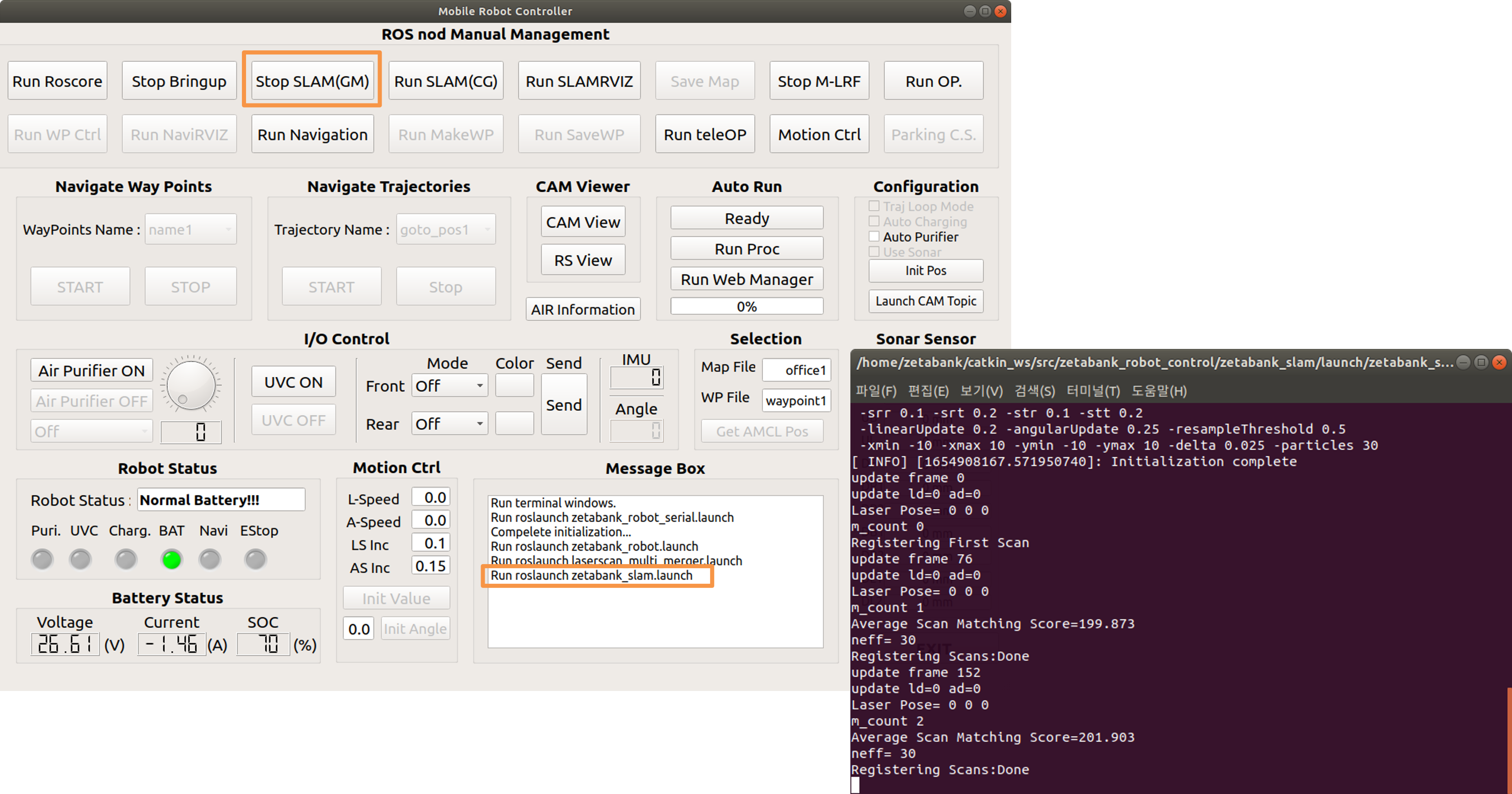
Run SLAM(GM)
Run SLAMRVIZ
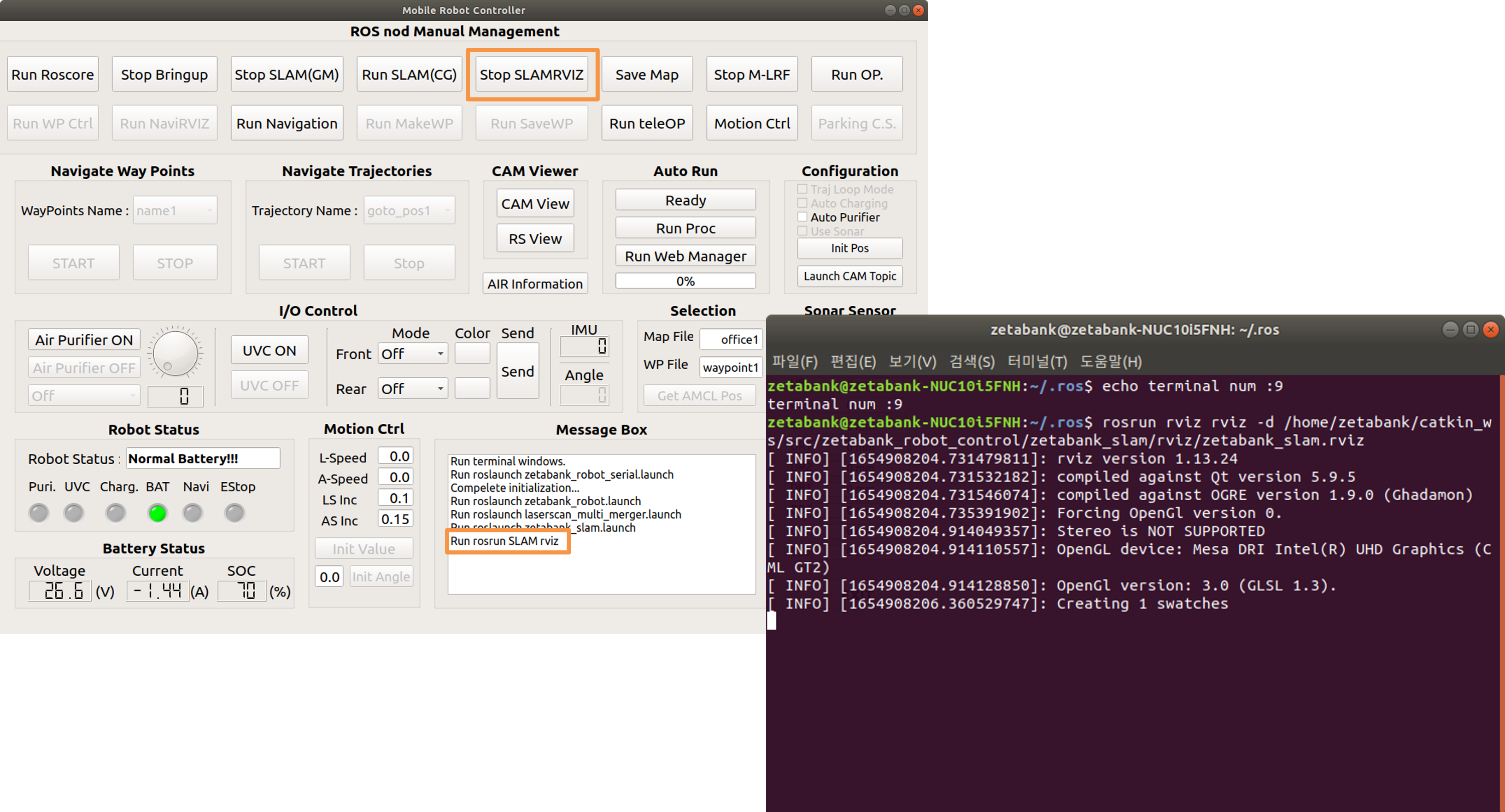
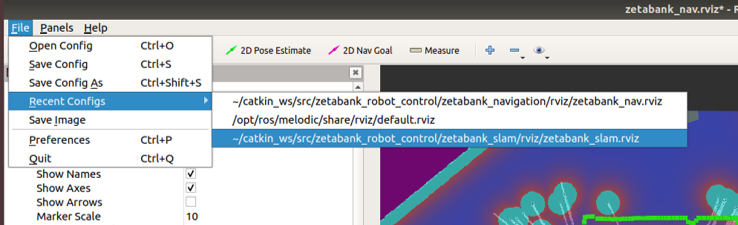
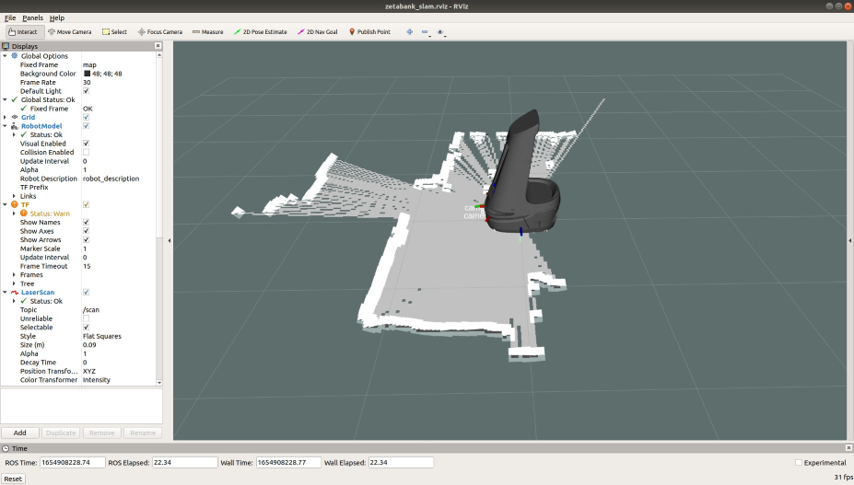
After running SLAM RVIZ, follow the path as above.
Draw Map
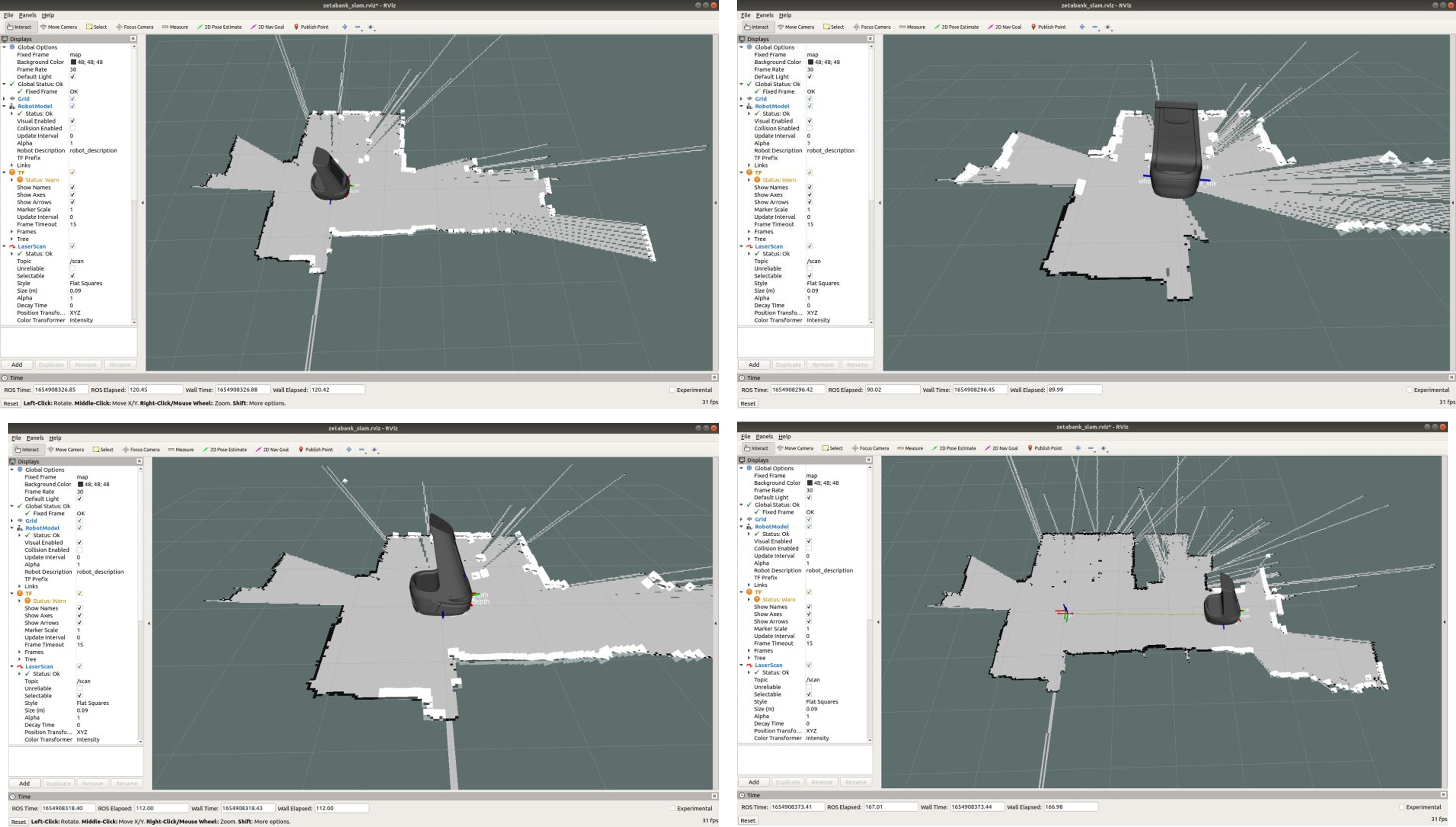
Draw the map while driving the robot using Motion ctrl.
Save Map
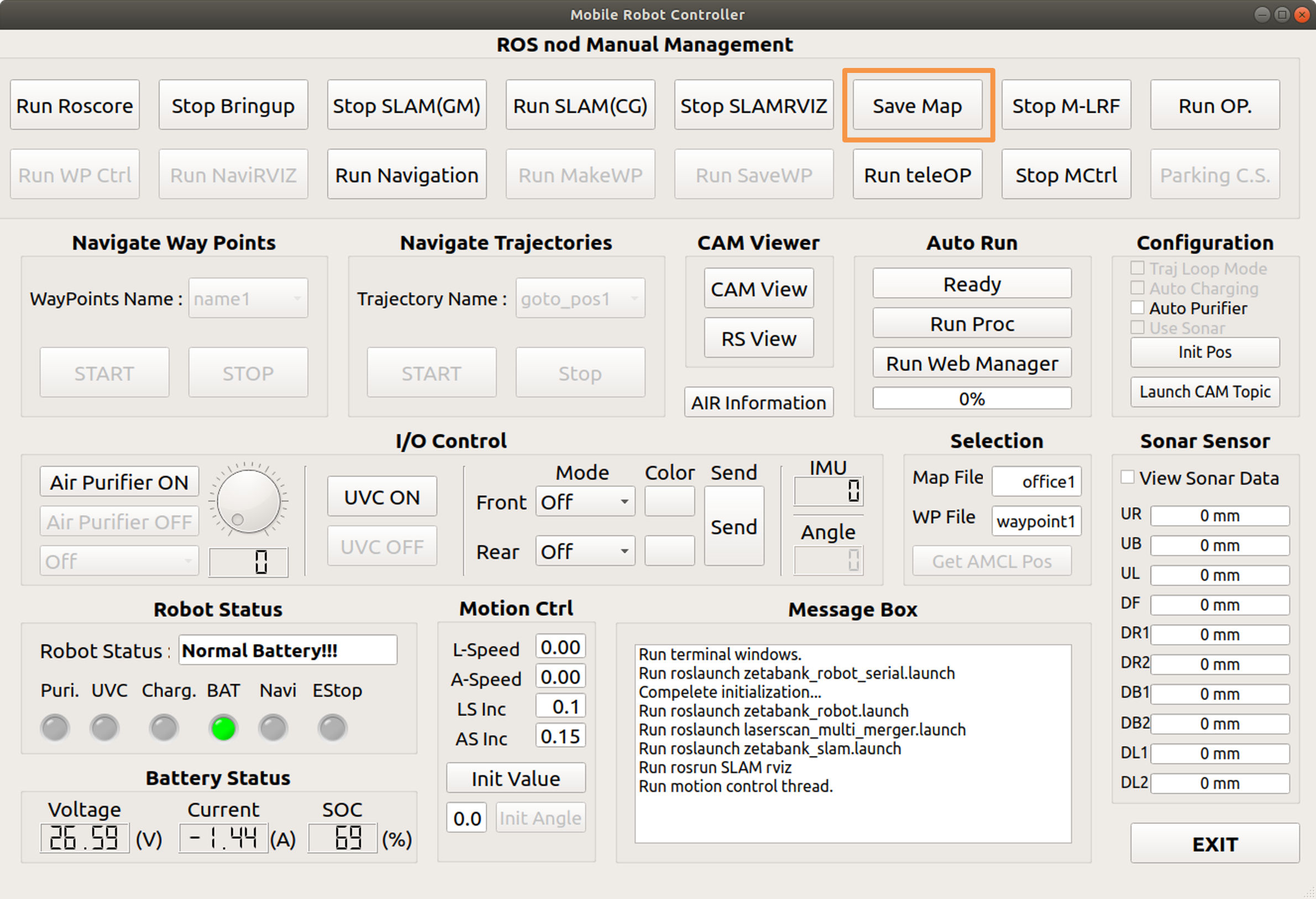
After drawing the map, click save map.
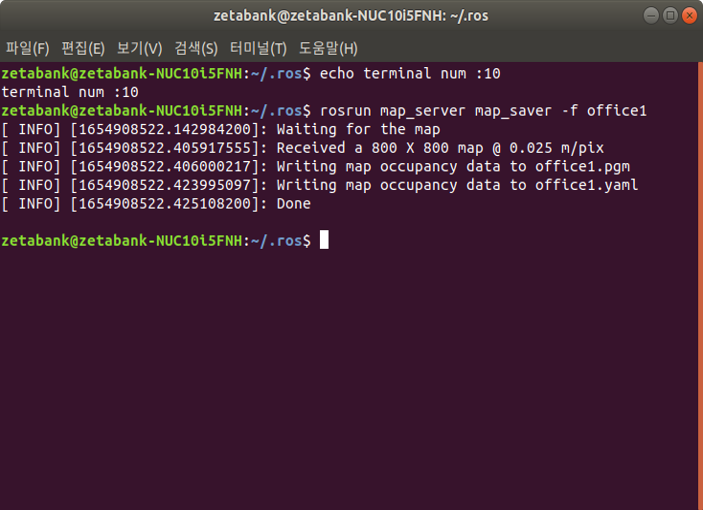
The command is automatically entered into the terminal and the map is saved.
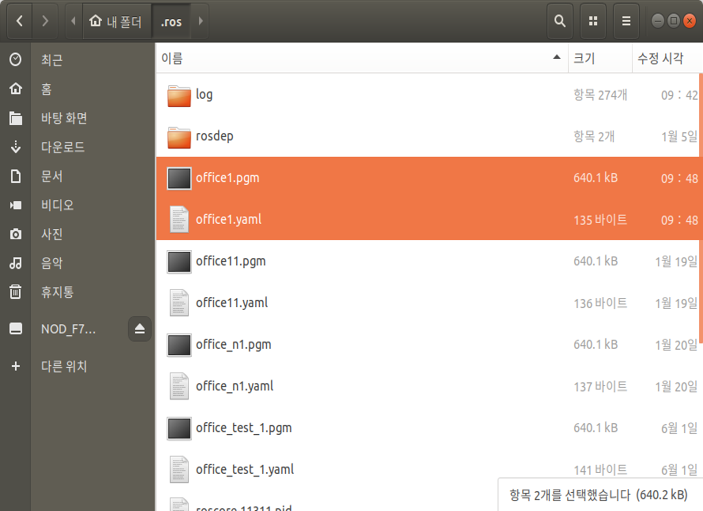
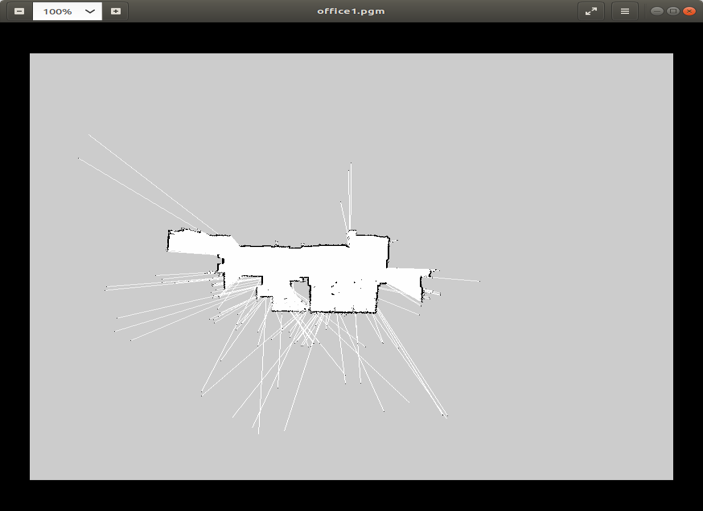
png file showing the appearance of the map and a yaml file with the detailed data of the map are created.